



 產品分類
產品分類
六軸傳感器


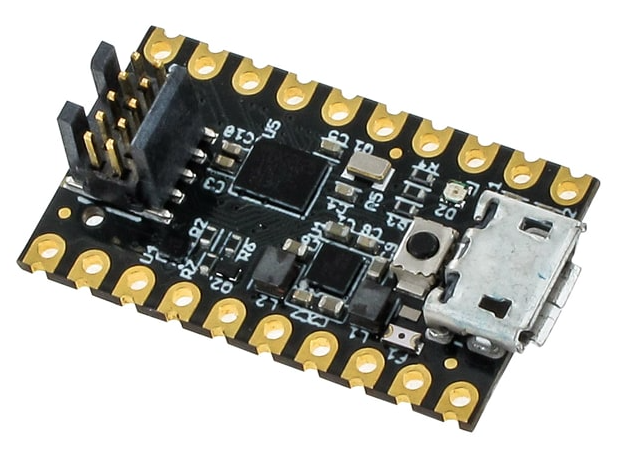
六軸傳感器
相關文章 : 3篇
瀏覽 : 142次
表示飛行器當前飛行姿態的一個通用模型就是建立下圖所示坐標系,并用Roll表示繞X軸的旋轉,Pitch表示繞Y軸的旋轉,Yaw表示繞Z軸的旋轉。 由于MPU6050可以獲取三個軸向上的加速度,而地球重力則是長期存在且永遠豎直向下,因此我們可以根據重力加速度相對于芯片的指向為參考算得當前姿態。 為方便起見,我們讓芯片正面朝下固定在上圖飛機上,且座標系與飛機的坐標系完全重合,以三個軸向上的加速度為分量,可構成加速度向量a(x,y,z)。假設當前芯片處于勻速直線運動狀態,那么a應垂直于地面上向,即指向Z軸負方向,模長為|a|=g=sqrt{X^ 2 +Y^ 2+ z^ 2}。若芯片(座標系)發生旋轉,由于加速度向量a仍然豎直向上,所以Z軸負方向將不再與a重合。見下圖。



推薦產品





列表欄目















 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)


