



 產(chǎn)品分類
產(chǎn)品分類
并聯(lián)機(jī)器人如何優(yōu)化、簡化電子制造流程
 139
139
 拍明芯城
拍明芯城
作者:Jody Muelaner
并聯(lián)機(jī)器人的體積相對較小,用于食品、藥品包裝以及電子器件裝配。并聯(lián)機(jī)器人具有出色的精度和高速性能,使其非常適合這些應(yīng)用。這類機(jī)器人的此種并聯(lián)運(yùn)動學(xué)特性使得快速、準(zhǔn)確地運(yùn)動成為可能,也使其擁有了與鉸接臂機(jī)器人截然不同的蜘蛛般外形。
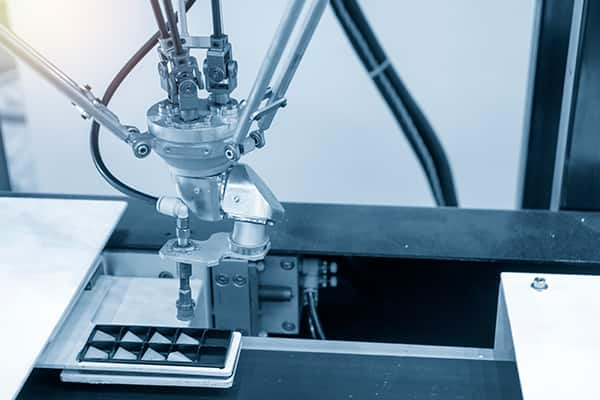
圖 1:機(jī)器人聯(lián)動臂在帶有照明效果的電子器件生產(chǎn)線上的使用情況。- 素材照片(圖片來源:Phuchit ? Getty Images)
并聯(lián)機(jī)器人一般情況下安裝在天花板上,以便從上方在移動的裝配和包裝生產(chǎn)線進(jìn)行操作。這種機(jī)器人的工作容積比鉸接臂小得多,進(jìn)入有限空間的能力也非常有限。也就是說,剛度和可重復(fù)性是這種機(jī)器人在精密工件的高精度加工過程中的有利條件——包括在裝配過程中的半導(dǎo)體器件。
并聯(lián)機(jī)器人的背景知識
工業(yè)機(jī)器人大致可分為移動機(jī)器人、串聯(lián)機(jī)械手或并聯(lián)機(jī)械手。
移動機(jī)器人包括地面自主車輛 (AGV) 和自動叉車,這類機(jī)器人經(jīng)設(shè)定后,主要用于在工廠和倉庫中移動材料。
歸類為串聯(lián)機(jī)械手的機(jī)器人具有一連串用來連接固定基座和終端效應(yīng)器的運(yùn)動聯(lián)桿;這類機(jī)器人包括鉸接臂和線性機(jī)器人。由于每根聯(lián)桿的剛度和位置精確度都取決于前一根聯(lián)桿,因此,聯(lián)桿離基座越遠(yuǎn),串行機(jī)械手的精確度和剛度就越低。雖然有例外,但這種結(jié)構(gòu)往往將六軸機(jī)器人的精確度限制在數(shù)個毫米之內(nèi)...而且在快速移動到新位置并停止后,其末端效應(yīng)器將振蕩一段時間后才會穩(wěn)定下來。
在許多與并聯(lián)機(jī)器人相同的應(yīng)用中,有一種串聯(lián)機(jī)械手是選擇性順應(yīng)鉸接式機(jī)械臂或 SCARA 機(jī)器人。這種機(jī)器人在機(jī)械方面相當(dāng)簡單,有兩個旋轉(zhuǎn)式關(guān)節(jié),以使其軸線相互平行,同時和第三條線性軸平行。兩個旋轉(zhuǎn)式關(guān)節(jié)提供單一平面內(nèi)的 X - Y 定位,而第三個線性軸則提供沿 Z 方向上的運(yùn)動。雖然 SCARA 可能沒有并聯(lián)機(jī)器人那樣的精度,但其成本相對較低并能相當(dāng)快速地執(zhí)行任務(wù)——甚至是在狹窄空間內(nèi)。

圖 2:并聯(lián)機(jī)器人是一種并聯(lián)機(jī)械手,有三個平行四邊形同時連接至位于末端效應(yīng)器端部的剛性體上。可以在相對于機(jī)器人基座的一個自由度上驅(qū)動每個平行四邊形的基座。并聯(lián)機(jī)器人通常安裝在天花板上,在輸送機(jī)或工件上方進(jìn)行操作。(圖片來源:Wikimedia Commons)
與串聯(lián)機(jī)械手相比,歸類為并聯(lián)機(jī)械手的機(jī)器人(包括并聯(lián)機(jī)器人)有多個運(yùn)動學(xué)聯(lián)桿將末端效應(yīng)器與底座連接起來。這種形態(tài)的機(jī)器人其自身結(jié)構(gòu)比串聯(lián)式機(jī)器人的結(jié)構(gòu)更堅(jiān)固、剛性更強(qiáng)、重量更輕。這種輕型、剛性結(jié)構(gòu)使得并聯(lián)機(jī)器人能夠迅速加速,實(shí)現(xiàn)非常短的操作周期。另一類型并聯(lián)機(jī)械手是 Stewart 平臺或六爪機(jī)器人;這類機(jī)器人擁有最高的剛度、精度和速度——通常用于在精密光學(xué)應(yīng)用中實(shí)時校正振動。
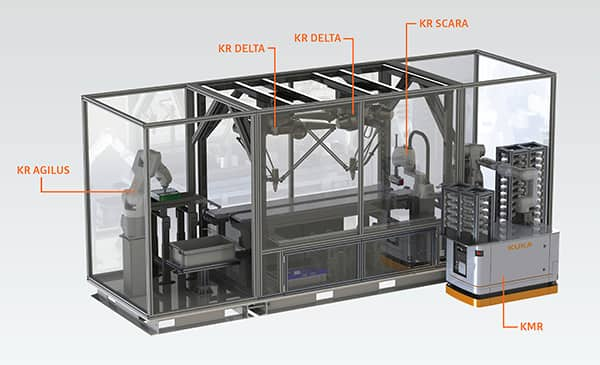
圖 3:如圖所示為采用了并聯(lián)機(jī)器人、SCARA 機(jī)器人和移動機(jī)器人的 視覺加載式工作單元。并聯(lián)機(jī)器人采用不銹鋼制造,符合 IP-67 級要求。(圖片來源:KUKA)
通常情況下,并聯(lián)機(jī)器人的每個平行四邊形都是由旋轉(zhuǎn)電機(jī)以線性驅(qū)動方式來驅(qū)動的。(Igus Drylin 系列的低成本并聯(lián)機(jī)器人采用了一種不太常見的線性驅(qū)動配置)。平行四邊形的耦合限制了末端效應(yīng)器只能進(jìn)行平移。這使其具有了與三軸線性機(jī)器相同的運(yùn)動度,但結(jié)構(gòu)更堅(jiān)硬、重量更輕。這種配置的另一個優(yōu)勢在于,驅(qū)動電機(jī)的本體位于(通常是安裝在天花板上的)底座中,因此這種機(jī)器人的所有運(yùn)動部件都是受驅(qū)式輕型結(jié)構(gòu)件。一些并聯(lián)機(jī)器人在末端效應(yīng)器上以串聯(lián)方式安裝了額外的旋轉(zhuǎn)軸,以提供四、五或六軸運(yùn)動。
并聯(lián)機(jī)器人應(yīng)用概述
并聯(lián)機(jī)器人廣泛用于電子組裝以及食品、藥品包裝的拾放應(yīng)用。當(dāng)并聯(lián)機(jī)器人在一個或多個傳送帶或移動裝配平臺上工作時,工件被傳送或以其他方式輸送到該機(jī)器人的工作范圍內(nèi)。然后,視覺系統(tǒng)識別零件的確切位置和方向,以指引機(jī)器人抓取零件的位置和時間或以其他方式操作該零件。

圖 4:這種由伺服電機(jī)驅(qū)動的并聯(lián)機(jī)器人在三個自由度 (DOF) 以及一個旋轉(zhuǎn)軸上以每分鐘 200 個周期的速度移動。控制器能以 2 毫秒的響應(yīng)時間控制這些機(jī)器人的軸,以便與輸送機(jī)和其他任務(wù)同步。事實(shí)上,另一種并聯(lián)器人是 Quattro。這種機(jī)器人有四個而不是三個平行四邊形與底座和末端效應(yīng)器連接,以便在高速下實(shí)現(xiàn)高剛性和定位精確度。(圖片來源:Omron Automation)
因此,并聯(lián)機(jī)器人可能會抓取物品,然后將其移動到所需的位置。接下來,機(jī)器人可能會在目標(biāo)地點(diǎn)和方向上將物品放下。例如,并聯(lián)機(jī)器人可以在傳送帶上隨機(jī)抓取電子元器件,并將其組裝到由第二條傳送帶送至工作單元的電路板上。
多個并聯(lián)機(jī)器人通常沿著一條有兩條平行且連續(xù)移動的傳送帶的生產(chǎn)線同時工作,進(jìn)行即時拾放操作。中央控制系統(tǒng)會協(xié)調(diào)這種裝置的系統(tǒng)——嚴(yán)重依賴機(jī)器視覺來通知機(jī)器人具體的控制路徑。每個單獨(dú)的拾放操作只需在幾分之一秒內(nèi)即可完成。
通過幾個并聯(lián)機(jī)器人同時操作,可以進(jìn)行非常快速的組裝和包裝。
電子制造業(yè)特有的并聯(lián)機(jī)器人的用途
電子制造行業(yè)依靠并聯(lián)機(jī)器人來運(yùn)輸、處理印刷電路板 (PCB) 和部件、PCB 組件和設(shè)備組件。
PCB 是通過非導(dǎo)電基材和銅層實(shí)現(xiàn)分層的。電路布局通常用平版印刷法印刷在板子上;然后用化學(xué)方法蝕刻掉其余銅層。然后采用不導(dǎo)電焊接掩模,以防止緊密定位的元器件和銅印制線之間出現(xiàn)焊接橋連。PCB 組裝包括放置、焊接通孔或表面貼裝 (SMT) 元器件。老式印刷電路板只使用通孔元器件,但現(xiàn)在這種情況已不多見。通孔元器件的引線通過電路板上的孔插入,并在電路板反面進(jìn)行焊接,以獲得更大的機(jī)械強(qiáng)度,但這一額外步驟增加了組裝難度。難怪目前在小型元器件中絕大多數(shù)是 SMT 元器件;因?yàn)檫@種元器件更適合高度自動化的批量制造。也就是說,對于如電容器、變壓器和連接器等較大的元器件,往往仍然需要采用通孔安裝方式安裝。

圖 5:輸送帶上的電子板通過裝配工作單元的圖(圖片來源:Getty Images)
對于這兩種 PCB 元器件的安裝,機(jī)器視覺輔以并聯(lián)機(jī)器人能夠在元器件在電路板上安裝之前檢查其變化和方向。為了達(dá)到高產(chǎn)量,機(jī)器人拾放頭可以采用一次處理多個元器件的設(shè)計(jì)。一個機(jī)器人末端效應(yīng)器也可以涂抹錫膏,另一個機(jī)器人則可以用來加熱,為已安裝的元器件進(jìn)行電氣連接。除此之外,還可通過波峰焊技術(shù)連接部件...盡管這類機(jī)器很昂貴...但最適大規(guī)模批量生產(chǎn)。對于插入機(jī)器來說,過于龐大的元器件往往以手工方式裝配到半導(dǎo)體板上,這樣導(dǎo)致了更高的成本。對于元器件之間難以觸及的位置,也可能需要手動涂抹焊料。
對于后者,并聯(lián)機(jī)器人可以取代人工操作,放置較大的元器件以及在這些元器件之間進(jìn)行焊接操作。
并聯(lián)機(jī)器人的成本也可以低得多,而且遠(yuǎn)比線性拾放機(jī)器機(jī)更容易配置。畢竟,后者又大又重——類似于數(shù)控機(jī)床。線性系統(tǒng)很難移動,而且后續(xù)還可能需要昂貴且耗時的重新校準(zhǔn)。相比之下,并聯(lián)機(jī)器人體積小,重量輕,可以相當(dāng)頻繁地搬遷。在新的地點(diǎn)安裝后,并聯(lián)機(jī)器人只需運(yùn)行簡單的自我校準(zhǔn)程序即可恢復(fù)正常運(yùn)行。

圖 6:有些并聯(lián)機(jī)器人通過五個軸移動,為各種類型的物體定向。本文所示的 IRB 365 能夠以每分鐘 120 次的速度對重 1 公斤的產(chǎn)品進(jìn)行分揀、進(jìn)給、拾取、調(diào)整方向和放置——以滿足需要高產(chǎn)量、高效率生產(chǎn)設(shè)施的要求。在一個名為 OmniCore 的緊湊型并聯(lián)機(jī)器人控制器的控制下,該系統(tǒng)實(shí)現(xiàn)了高性能運(yùn)動控制、數(shù)字連接和一千多種編程功能。(圖片來源:ABB)
并聯(lián)機(jī)器人的選擇豐富多樣。與大多數(shù)主要生產(chǎn)鉸接臂機(jī)器人的工業(yè)機(jī)器人制造商不同,Codian Robotics 專注于并聯(lián)機(jī)器人。該供應(yīng)商的并聯(lián)機(jī)器人具有 1.5 kg 至 125 kg 有效載荷,可執(zhí)行小至微小電子元器件,大到許多大型設(shè)計(jì)的轉(zhuǎn)配任務(wù)。Mitsubishi Electric 將 Codian并聯(lián)機(jī)器人與 Mitsubishi 控制器配套使用。
ABB 的并聯(lián)機(jī)器人品牌為 FlexPicker。現(xiàn)有產(chǎn)品的型號是 IRB 360,這是一款末端效應(yīng)器串聯(lián)了兩個輔助旋轉(zhuǎn)軸的并聯(lián)機(jī)器人,可實(shí)現(xiàn)五軸運(yùn)動。這類機(jī)器人針對拾放操作進(jìn)行了優(yōu)化。
Fanuc 生產(chǎn)的并聯(lián)機(jī)器人包括兩個系列。M 系列包括用于裝配小部件(最常見的電子產(chǎn)品)的小型機(jī)器人以及大型機(jī)器人。M 系列機(jī)器人包括三軸、四軸和五軸配置。DR-3iB 系列機(jī)器人是較大型四軸機(jī)器人,用于分揀和包裝,其運(yùn)動速度高達(dá) 5.5 m/s,有效載荷高達(dá) 8 kg。
結(jié)束語
并聯(lián)機(jī)器人讓電子制造業(yè)實(shí)現(xiàn)了經(jīng)濟(jì)、靈活的自動化。與其他機(jī)器人和自動拾放機(jī)器相比,這類機(jī)器人通常具有更高的速度和靈活性。
責(zé)任編輯:David
【免責(zé)聲明】
1、本文內(nèi)容、數(shù)據(jù)、圖表等來源于網(wǎng)絡(luò)引用或其他公開資料,版權(quán)歸屬原作者、原發(fā)表出處。若版權(quán)所有方對本文的引用持有異議,請聯(lián)系拍明芯城(marketing@iczoom.com),本方將及時處理。
2、本文的引用僅供讀者交流學(xué)習(xí)使用,不涉及商業(yè)目的。
3、本文內(nèi)容僅代表作者觀點(diǎn),拍明芯城不對內(nèi)容的準(zhǔn)確性、可靠性或完整性提供明示或暗示的保證。讀者閱讀本文后做出的決定或行為,是基于自主意愿和獨(dú)立判斷做出的,請讀者明確相關(guān)結(jié)果。
4、如需轉(zhuǎn)載本方擁有版權(quán)的文章,請聯(lián)系拍明芯城(marketing@iczoom.com)注明“轉(zhuǎn)載原因”。未經(jīng)允許私自轉(zhuǎn)載拍明芯城將保留追究其法律責(zé)任的權(quán)利。
拍明芯城擁有對此聲明的最終解釋權(quán)。
相關(guān)資訊
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡設(shè)計(jì)方案

圖像傳感器在汽車、工業(yè)和邊緣AI的應(yīng)用動向

基于RFID技術(shù)的智能檔案管理系統(tǒng)設(shè)計(jì)方案

如何確保工業(yè)物聯(lián)網(wǎng)設(shè)計(jì)符合ISA/IEC安全標(biāo)準(zhǔn)

基于LPC55S69+i.MX 8M的快速靈活EV充電系統(tǒng)解決方案

如何利用物質(zhì)連接智能家居自動化的孤島


















 2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)


