



 產品分類
產品分類
GPS/MEMS
GPS/MEMS
相關文章 : 0篇
瀏覽 : 次
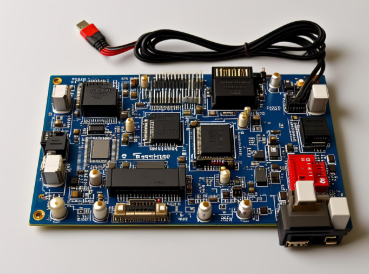
針對微機電系統(micro electro mechanical system,MEMS)慣性器件隨機噪聲大,現有的去噪算法難以兼顧降噪效果和信息處理速度的問題,提出自適應實時混合去噪算法;利用無軌跡卡爾曼濾波(unscented Kalman filter,UKF)算法進行信息融合,克服了擴展卡爾曼濾波(extended Kalman filter,EKF)對非線性系統線性化會帶來額外誤差的缺點;利用多線程信息同步技術實現微機電慣性導航系統(MEMS inertial navigation system,MEMS-INS)和全球定位系統(global position system,GPS)的同步運行.基于以上關鍵技術和算法,設計了一種GPS/MEMS-INS組合導航系統,實驗結果表明,該組合導航系統在靜態及動態環境下均能夠進行實時高精度地導航定位.
推薦產品





列表欄目















 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)


