



 產品分類
產品分類
一文讀懂電動汽車整車控制系統
 151
151
 拍明芯城
拍明芯城
關于汽車電控系統,它其實并不是新能源電動汽車專有的,燃油車同樣具備,只不過新能源電動汽車的電控系統更加的復雜,也更強大。
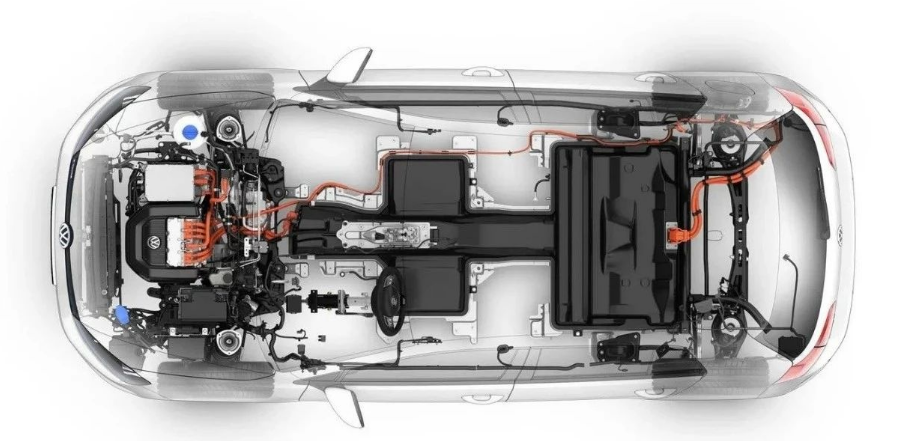
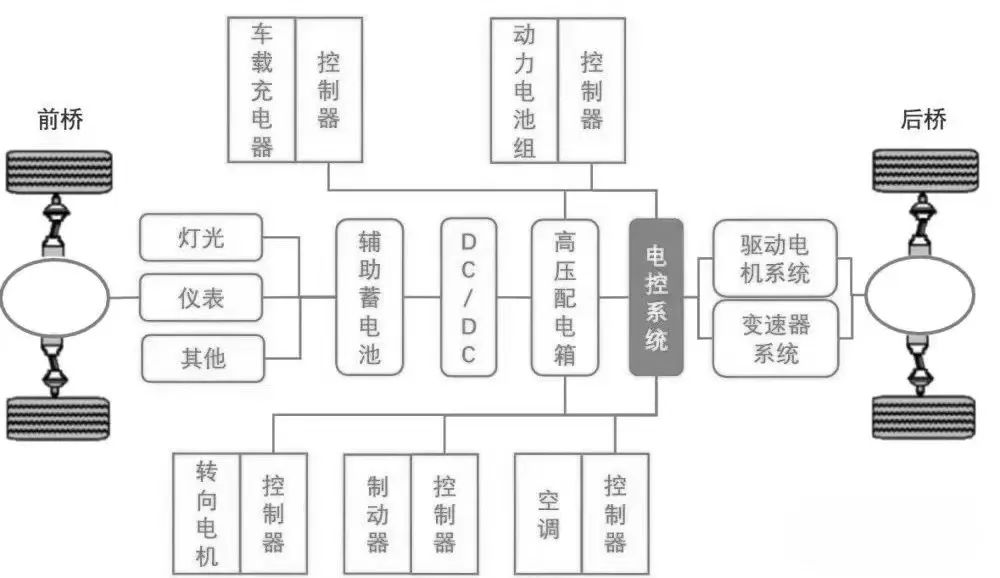
汽車電控系統,就是汽車電子控制系統,是由模塊控制的系統總稱,它由硬件和軟件構成,電控其實就是車輛所有電子控制系統的軟件+硬件的總稱,我們可以將整個電控系統理解為車輛的神經系統,這個系統可以控制車輛的運行能力,所以電控系統越強大,車輛的控制與行駛能力越出色。今天咱們就來聊聊新能源汽車的整車控制系統。
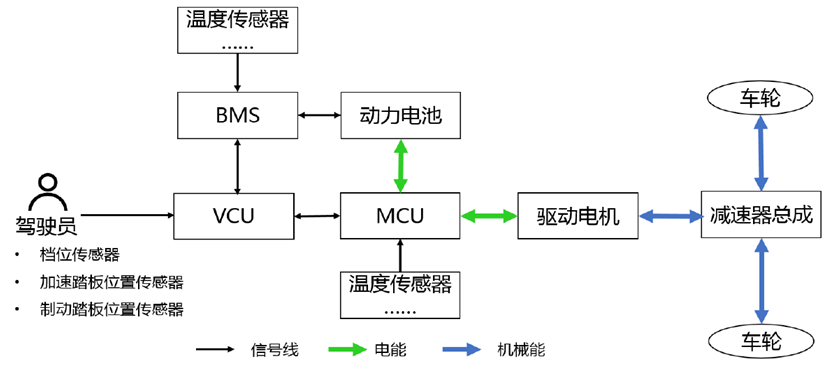
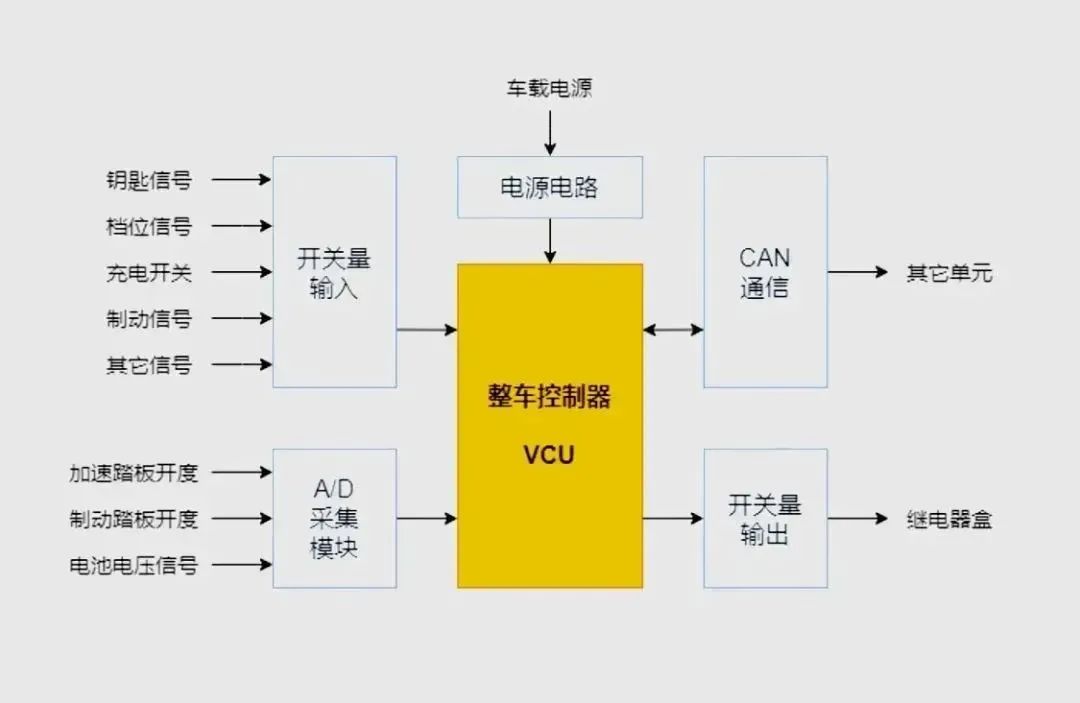
整車控制系統由加速踏板位置傳感器,制動踏板位置傳感器,電子換擋器等輸入信號傳感器,整車控制器(VCU),電機控制器(MCU),電池管理系統(BMS)等控制模塊和驅動電機,動力電池等執行元件組成。
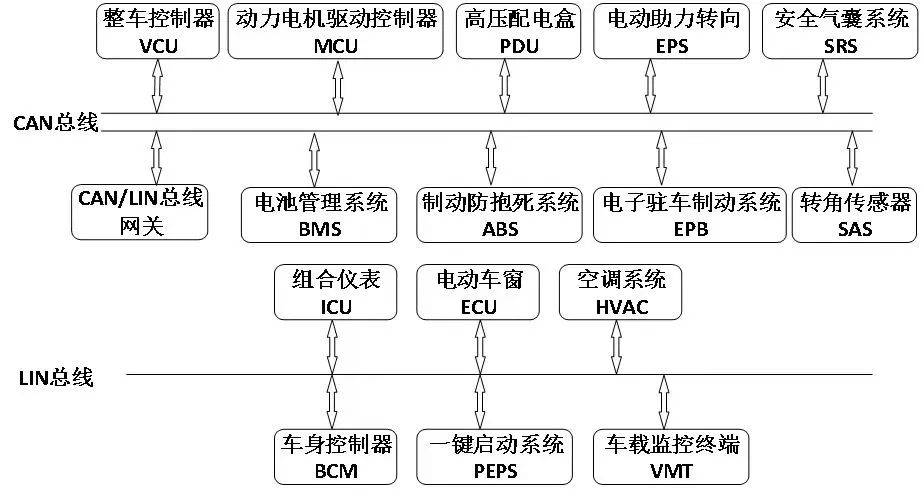
汽車上的這些控制器通過CAN網絡來通信。CAN,全稱為“Controller Area Network”,即控制器局域網,是國際上應用最廣泛的現場總線之一。最初,CAN被設計作為汽車環境中的微控制器通訊,在車載各電子控制裝置ECU之間交換信息,形成汽車電子控制網絡。比如:發動機管理系統、變速箱控制器、儀表裝備、電子主干系統中,均嵌入CAN控制裝置。
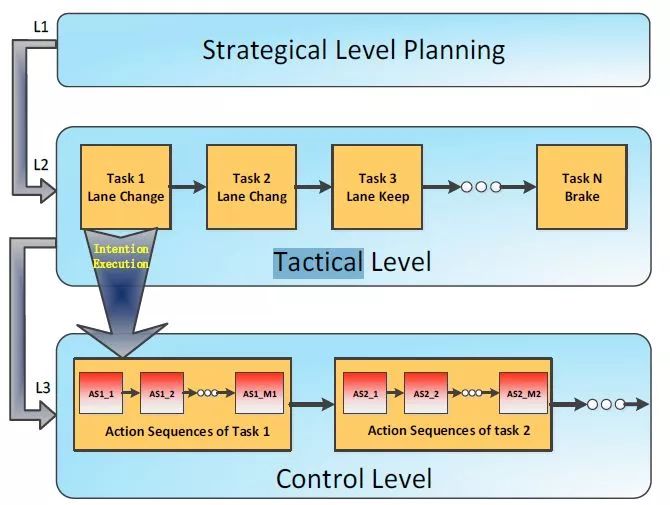
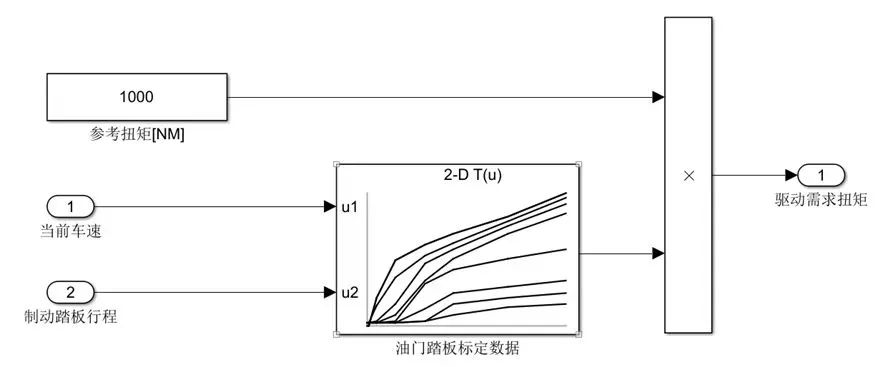
1、駕駛員駕駛意圖解析
主要是對駕駛員操作信息及控制命令進行分析處理,也就是將駕駛員的油門信號和制動信號根據某種規則,轉化成電機的需求轉矩命令 。因而驅動電機對駕駛員操作的響應性能完全取決于整車控制的油門解釋結果,直接影響駕駛員的控制效果和操作感覺。
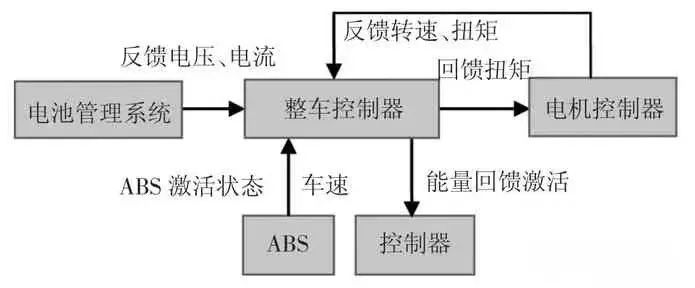
2、整車驅動控制
根據駕駛員對車輛的操縱輸入(加速踏板、制動踏板以及選檔開關)、車輛狀態、道路及環境狀況,經分析和處理,向整車管理系統發出相應的指令,控制電機的驅動轉矩來驅動車輛,以滿足駕駛員對車輛驅動的動力性要求;同時根據車輛狀態,向整車管理系統發出相應指令,保證安全性、舒適性。
3、制動能量回饋控制
整車控制器根據加速踏板和制動踏板的開度、車輛行駛狀態信息以及動力電池的狀態信息(如SOC值)來判斷某一時刻能否進行制動能量回饋,在滿足安全性能、制動性能以及駕駛員舒適性的前提下,回收部分能量。包括滑行制動和剎車制動過程中的電機制動轉矩控制。
4、整車能量優化管理
通過對電動汽車的電機驅動系統、電池管理系統、傳動系統以及其它車載能源動力系統(如空調、電動泵等)的協調和管理,提高整車能量利用效率,延長續駛里程。
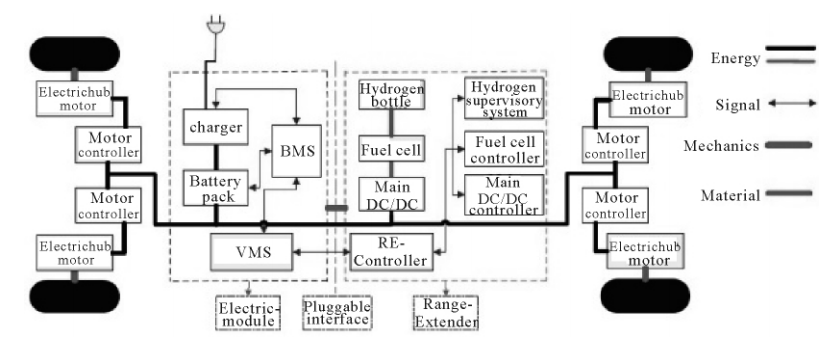
在純電動汽車中,電池除了給驅動電機供電以外,還要給其他電器供電。因此,為了獲得最大的續駛里程,整車控制器將負責整車的能量管理,以提高能量的利用率。在電池的SOC值比較低的時候,整車控制器將對其他電器發出指令,限制其他電器的輸出功率,或關閉部分輔助設備來增加續駛里程。
5、充電過程控制
與電池管理系統共同進行充電過程中的充電功率控制,整車控制器接收到充電信號后,應該禁止高壓系統上電,保證車輛在充電狀態下處于行駛鎖止狀態;并根據電池狀態信息限制充電功率,保護電池。
6、電控系統的上下電控制
6.1、高壓上電
點火鑰匙ON檔,BMS、MCU當前狀態正常、且在之前一次上下電過程中整車無嚴重故障:
1)BMS、MCU初始化完成,VCU確認狀態;
2)閉合電池繼電器;
3) 閉合主繼電器;
4)MCU高壓上電;
5)如檔位在N檔,儀表顯示Ready燈點亮。
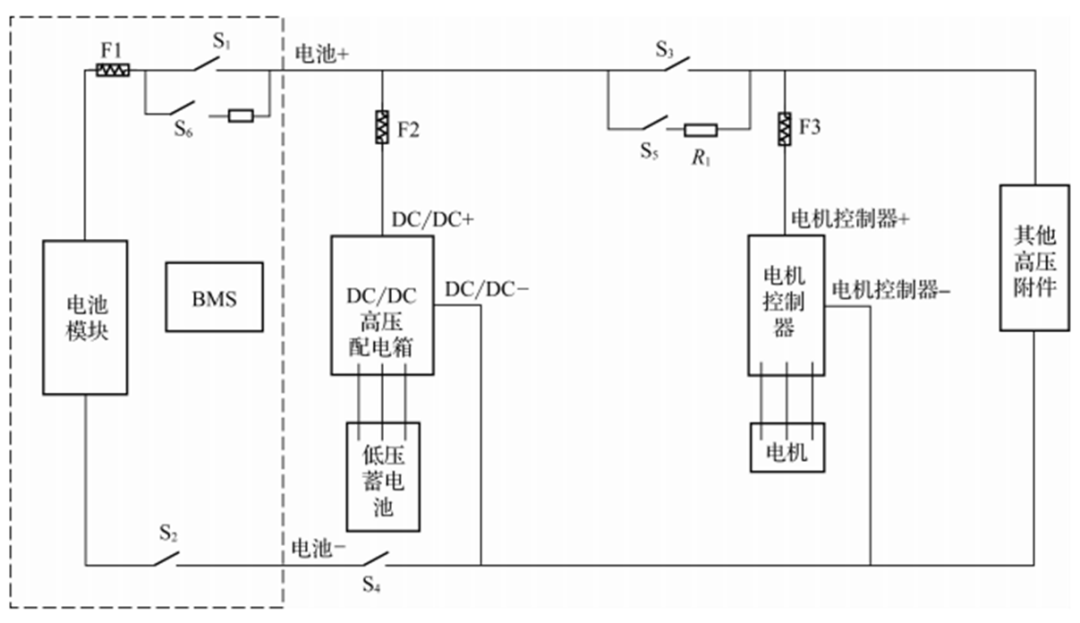
6.2、下電順序
純電動車下電只需點火鑰匙打到OFF檔,即可實現高壓、低壓電的正常下電:
1)點火鑰匙到OFF檔,主繼電器斷開、MCU低壓下電;
2)輔助系統停止工作,包括DC/DC、水泵、空調、暖風;
3)BMS新開電池繼電器;
4)整車控制器下電 (VCU) 整車控制器在下電前會存儲行車過程中發生的故障信息。
7、電動化輔助系統管理
電動化輔助系統包括電動空調、電制動、電動助力轉向。整車控制器應該根據動力電池以及低壓電池狀態,對DC/DC、電動化輔助系統進行監控。
8、車輛狀態的實時監測和顯示
整車控制器應該對車輛的狀態進行實時檢測,并且將各個子系統的信息發送給車載信息顯示系統,其過程是通過傳感器和CAN總線,檢測車輛狀態及其動力系統及相關電器附件相關各子系統狀態信息,驅動顯示儀表,將狀態信息和故障診斷信息通過數字儀表顯示出來。
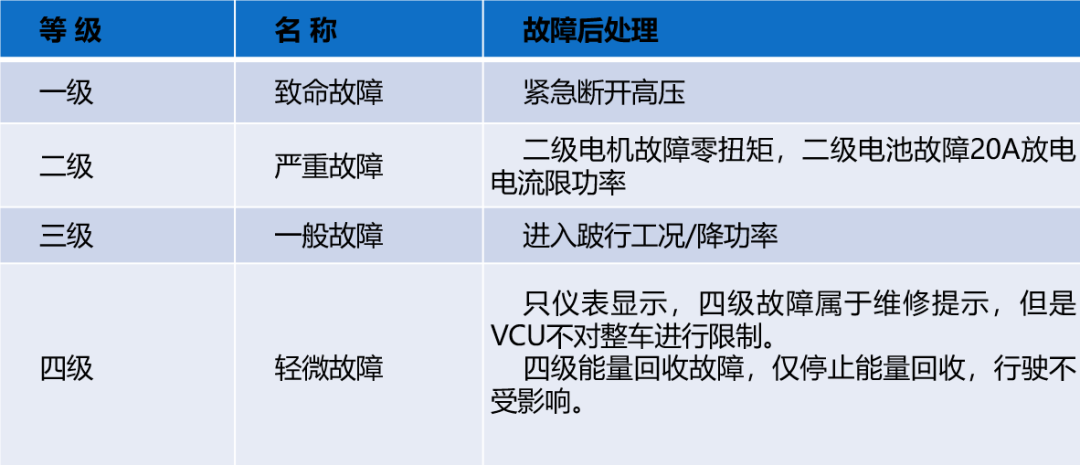
9、故障診斷與處理
連續監視整車電控系統,進行故障診斷,并及時進行相應安全保護處理。根據傳感器的輸入及其它通過CAN總線通訊到的電機、電池、充電機等信息,對各種故障進行判斷、等級分類、報警顯示;存儲故障碼,供維修時查看。故障指示燈只是出故障類型和部分故障碼。在行車過程中,根據故障內容作故障診斷與處理。
整車的故障等級進行4級劃分:
10、遠程控制
10.1、遠程查詢功能
用戶可以通過手機APP實時查詢車輛狀態,實時了解車輛的狀況包括:剩余SOC值、續駛里程等。
10.2、遠程空調控制
無論是在炎熱的夏季還是在寒冷的冬季,用戶在出門前就可以通過手機指令實現遠程的空調制冷、空調暖風和除霜功能。
10.3、遠程充電控制
用戶離開車輛時將充電槍插入充電樁,并不進行立即充電,可以利用電價波谷并在家里實時查詢SOC值,需要充電時通過手機APP發送遠程充電指令,進行充電操作.
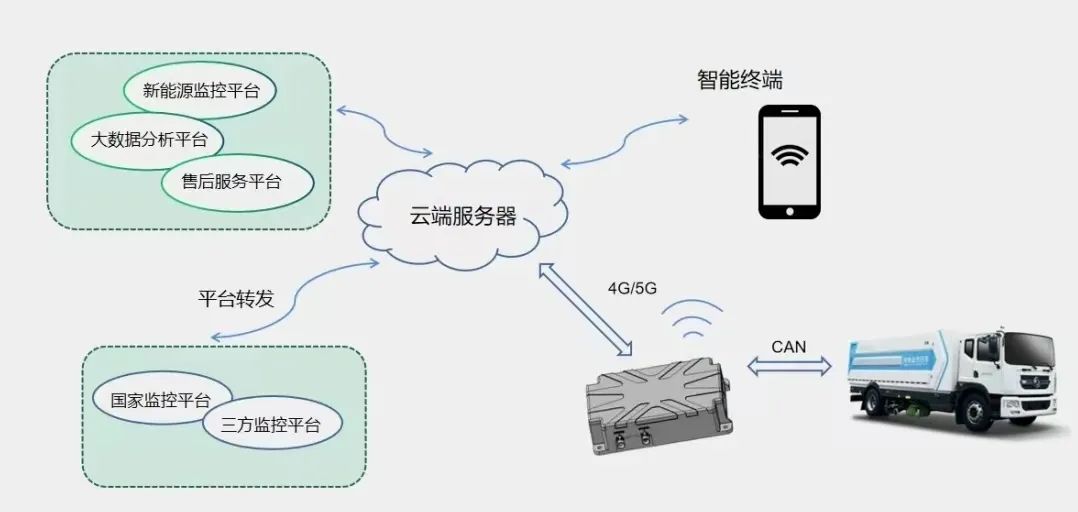
圖5、遠程充電控制
11、整車CAN總線網關及網絡化管理
電動轎車CAN總線系統由中央控制器、電池管理系統、電機控制系統、制動控制系統、儀表控制系統組成。各個控制器之間通過CAN總線進行通信,以實現傳感器測量數據的共享、控制指令的發送和接收等,并使各自的控制性能都有所提高,從而提高系統的控制性能。它們之間的通信與信息類型為信息類和命令類。信息類主要是發送一些信息,如傳感器信號、診斷信息、系統的狀態。命令類則主要是發送給其他執行器的命令。
12、基于CCP的在線匹配標定
基于CCP的在線匹配標定協議采用主-從式通信方式,主設備通過CAN總線與多臺從設備相連接,主設備是測量標定系統,從設備是需要標定的ECU,主設備首先與其中一個從設備建立邏輯鏈接。建立邏輯連接后,主、從設備之間所有的數據傳遞均由主機控制,從設備執行主設備命令后返回包含命令響應值或錯誤代碼等信息的報文,同時從設備可以根據主設備通過控制命令所設置的列表信息,來定時地向主設備傳送變量信息,數據的傳遞是由主設備初始化并且由從設備來執行的,并且是由固定的循環采樣頻率或者事件觸發的。
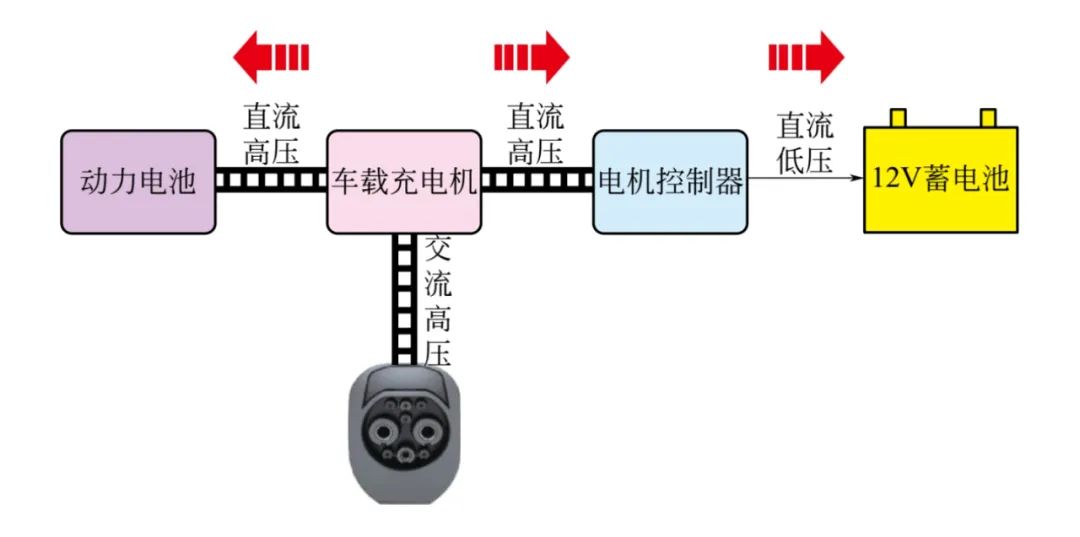
13、DC/DC控制與EPS控制
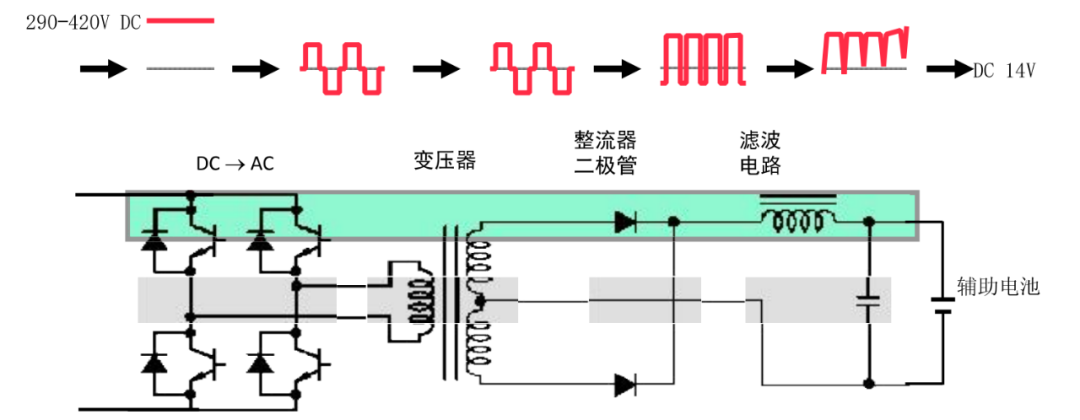
13.1、DC/DC控制
DC/DC變換器即是把直流電壓變換為另一數值的直流電壓,是開關電源技術的一個分支。它是由半導體功率器件作為的開關管、二極管、電感、電容、負載和直流電源構成的,通過使帶濾波器的負載電路和直流電壓時而接通、時而關斷,使得負載上得到另一個直流電壓。
13.2、EPS控制
汽車電動助力式轉向系統利用電動機產生的轉矩,經過轉向系統減速及傳遞機構轉化后協助駕車者進行動力轉向。不同車的EPS結構部件盡管不一樣,但基本原理是一致的。在檢測到有效汽車點火信號后,當轉向軸轉動時,轉矩或轉角傳感器將檢測到的轉矩和轉角信號輸出至電子控制單元ECU
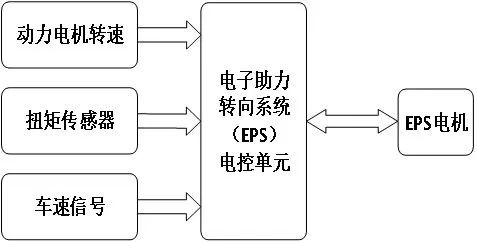
ECU根據轉矩、轉角信號,汽車速度、軸重負載信號等進行分析和計算,得出助力電動機的轉向和目標助力電流的大小,從而實現助力轉向控制。
14、換擋控制功能
換擋控制功能關系著駕駛員的駕駛安全,正確理解駕駛員意圖,以及識別車輛合理的檔位,在基于模型開發的檔位管理模塊中得到很好的優化。能在出現故障時作出相應處理保證整車安全,在駕駛員出現檔位誤操作時通過儀表等提示駕駛員,使駕駛員能迅速做出糾正。
15、防溜車功能控制
純電動汽車在坡上起步時,駕駛員從松開制動踏板到踩油門踏板過程中,會出現整車向后溜車的現象。在坡上行駛過程中,如果駕駛員踩油門踏板的深度不夠,整車會出現車速逐漸降到0然后向后溜車現象。因此為了防止汽車在坡上起步和運行時向后溜車現象,在整車控制策略中增加了防溜車功能。
防溜車功能可以保證整車在坡上起步時,向后溜車小于10CM;在整車坡上運行過程中如果動力不足時,整車車速會慢慢降到0,然后保持0車速,不再向后溜車。
責任編輯:David
【免責聲明】
1、本文內容、數據、圖表等來源于網絡引用或其他公開資料,版權歸屬原作者、原發表出處。若版權所有方對本文的引用持有異議,請聯系拍明芯城(marketing@iczoom.com),本方將及時處理。
2、本文的引用僅供讀者交流學習使用,不涉及商業目的。
3、本文內容僅代表作者觀點,拍明芯城不對內容的準確性、可靠性或完整性提供明示或暗示的保證。讀者閱讀本文后做出的決定或行為,是基于自主意愿和獨立判斷做出的,請讀者明確相關結果。
4、如需轉載本方擁有版權的文章,請聯系拍明芯城(marketing@iczoom.com)注明“轉載原因”。未經允許私自轉載拍明芯城將保留追究其法律責任的權利。
拍明芯城擁有對此聲明的最終解釋權。
相關資訊
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡設計方案

圖像傳感器在汽車、工業和邊緣AI的應用動向

基于RFID技術的智能檔案管理系統設計方案

如何確保工業物聯網設計符合ISA/IEC安全標準

基于LPC55S69+i.MX 8M的快速靈活EV充電系統解決方案

如何利用物質連接智能家居自動化的孤島


















 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)


