



 產品分類
產品分類

2025-05

stm32F405RGT6芯片手冊
STM32F405RGT6芯片手冊詳解一、芯片概述STM32F405RGT6是意法半導體(STMicroelectronics)推出的一款基于ARM Cortex-M4內核的高性能32位微控制器,廣泛應用于工業控制、消費電子、醫療設備、智能家居及物聯網等領域。其核心優勢在于強大的計算能力、豐富的外設接口以及靈活的功耗管理特性,能夠滿足中高......


2025-05

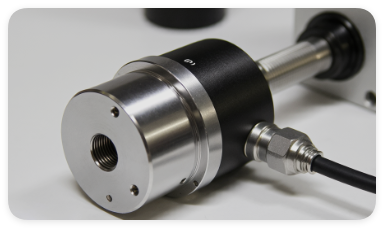
01542橫擺角速度傳感器安裝位置
橫擺角速度傳感器(通常指陀螺儀或慣性測量單元IMU中的Z軸陀螺儀)是車輛動態控制系統(如ESP、ESC、自動駕駛)的核心部件,用于測量車輛繞垂直軸(Z軸)的旋轉角速度(即橫擺角速度)。其安裝位置直接影響測量精度和系統穩定性,以下是關鍵分析:一、典型安裝位置及原則1. 車輛質心附近(推薦位置)位置:通常安裝在車輛底盤中心區域(如座椅下方、中......
2025-05

stm32f405單片機參數
STM32F405單片機詳細參數解析STM32F405是意法半導體(STMicroelectronics)推出的一款基于ARM Cortex-M4內核的高性能32位微控制器,廣泛應用于工業控制、醫療設備、消費電子、無人機、音頻處理等領域。其強大的計算能力、豐富的外設接口和低功耗設計,使其成為嵌入式系統開發中的熱門選擇。本文將詳細解析STM......
2025-05

角速度傳感器(陀螺儀)輸出波形核心特征
角速度傳感器(陀螺儀)的輸出波形是其性能的直觀體現,直接反映測量精度、動態響應和噪聲特性。以下從靜態特性、動態特性、噪聲與誤差三個維度深入解析其核心特征,避免復雜公式和冗余示例,聚焦實際應用中的關鍵表現。一、靜態輸出波形特征1. 直流偏置(Zero-Rate Output)定義:靜止時陀螺儀輸出的基準電壓或數字值(對應零角速度)。特性:理......
2025-05

角速度傳感器輸出波形
角速度傳感器(陀螺儀)的輸出波形直接反映其動態性能與測量特性,以下從波形特征、噪聲影響、典型場景三個維度展開分析,避免公式和示例:一、輸出波形的核心特征靜態波形直流偏置:靜止時輸出穩定的電壓或數字值(對應零角速度)。低頻噪聲:疊加在偏置上的隨機波動(如電子噪聲、溫度漂移),表現為微小毛刺或緩慢漂移。動態波形幅度變化:旋轉時波形幅度隨角速度......
2025-05

lm4701t參數
摘要LM4701T是由德州儀器(TI)及原國家半導體(National Semiconductor)推出的高保真單聲道AB類音頻功率放大器,具備30W(8Ω負載)輸出能力、靜音/待機模式及多重保護機制。本文從技術參數、封裝特性、電路設計、應用場景及替代方案等維度展開深度解析,并結合行業動態與未來趨勢,為工程師提供系統性參考。一、LM470......
2025-05

ltm4700參數如何配置
LTM4700參數配置詳解一、LTM4700概述與核心參數LTM4700是Analog Devices推出的一款高性能μModule穩壓器,采用高度集成的BGA封裝,支持雙通道50A或單通道100A輸出能力。其核心參數包括:輸入電壓范圍:4.5V至16V,適應多種電源輸入環境。輸出電壓范圍:0.5V至1.8V,支持數字可調輸出。效率:在1......
2025-05

陀螺儀和加速度計是如何協同工作的?
陀螺儀和加速度計是慣性測量單元(IMU)的核心傳感器,通過數據融合實現三維姿態估計、運動軌跡推算和動態環境感知。兩者在功能上互補,協同工作可克服單一傳感器的局限性,提升系統的精度與魯棒性。一、核心功能對比:陀螺儀 vs. 加速度計傳感器測量物理量核心功能局限性陀螺儀角速度(旋轉速率)實時監測物體繞軸的旋轉角度變化存在零偏漂移(誤差隨時間累......
2025-05

角速度傳感器在機器人技術中有哪些應用?
角速度傳感器(陀螺儀)是機器人實現運動控制、姿態感知和環境交互的核心元件,通過實時測量旋轉速率,為機器人的穩定性、靈活性和智能化提供關鍵數據支持。以下從機器人技術的核心需求出發,系統梳理其應用場景及技術價值。一、移動機器人:導航與運動控制自主導航與定位功能:結合加速度計和IMU(慣性測量單元),實現機器人的航跡推算(Dead Reckon......
2025-05

角速度傳感器有哪些常見應用場景?
角速度傳感器(陀螺儀)通過測量物體繞軸的旋轉速率(角速度),在多個領域發揮關鍵作用。以下從消費電子、工業、交通、航空航天等方向,系統梳理其典型應用場景及核心價值。一、消費電子領域智能手機與平板電腦功能:實現屏幕旋轉(橫豎屏切換)、游戲控制(如賽車類游戲的轉向)、AR/VR設備中的頭部追蹤。價值:提升用戶體驗,支持交互式應用。可穿戴設備功能......

2025-05

角速度傳感器常用的有哪幾種傳感方式?
陀螺儀和加速度計是慣性傳感器的兩大核心元件,分別用于測量角速度和線性加速度。以下用通俗語言解析兩者的核心原理,避免公式和復雜示例。一、陀螺儀的測量原理核心目標:測量物體繞某軸的旋轉速率(角速度)。原理:科里奧利效應:當一個物體在旋轉系統中運動時,會受到一個垂直于運動方向和旋轉軸的“假想力”(科里奧利力),導致其軌跡偏轉。陀螺儀通過檢測這種......
2025-05

6n138參數使用方法
6N138光耦參數詳解與使用方法一、6N138光耦概述6N138是一款高速光電耦合器,屬于達林頓型輸出結構,廣泛應用于需要電氣隔離的電路設計中。其核心功能是通過光信號實現輸入與輸出之間的電氣隔離,同時保持信號的快速傳輸。6N138具有高電流傳輸比(CTR)、低輸入電流、高共模抑制比(CMRR)等特點,適用于工業控制、通信設備、電源管理等領......
2025-05

陀螺儀和加速度計的區別是什么?
陀螺儀和加速度計是慣性傳感器中的兩大核心元件,廣泛應用于導航、姿態控制、運動監測等領域。盡管兩者均用于感知物體的運動狀態,但其測量原理、輸出參數和應用場景存在顯著差異。以下從多個維度深入對比兩者的區別:一、核心功能與測量對象特性陀螺儀(Gyroscope)加速度計(Accelerometer)測量對象角速度(Angular Velocit......
2025-05

6n139引腳圖及功能
6N139引腳圖及功能深度解析一、6N139概述6N139是一款高性能光電耦合器,屬于達林頓型光耦系列,廣泛應用于工業控制、通信設備、電源管理等領域。其核心功能是通過光電隔離技術實現輸入與輸出電路的電氣隔離,同時具備高增益、低輸入電流、高速響應等特性。本文將從引腳功能、內部結構、電氣參數、應用場景等多個維度對6N139進行全面解析。二、6......
2025-05

什么是MEMS振子?
MEMS振子(Micro-Electro-Mechanical Systems Oscillator)是微機電系統(MEMS)技術中的核心元件,通過微納加工工藝在硅基底上制造出微型機械振動結構,用于實現角速度、加速度、壓力等物理量的高精度測量。它是MEMS傳感器(如陀螺儀、加速度計)和執行器(如諧振器、濾波器)的關鍵組成部分,廣泛應用于消......
2025-05

光耦6n137作用及工作原理
一、光耦6N137概述6N137是一款單通道高速光耦合器,采用DIP-8封裝,內部由850nm波長AlGaAs發光二極管(LED)和集成檢測器組成。其檢測器核心包含光敏二極管、高增益線性運放及肖特基鉗位的集電極開路三極管,具備溫度、電流和電壓補償功能。該器件支持LSTTL/TTL兼容邏輯電平輸出,典型轉換速率達10Mbps,輸入電流僅需5......
2025-05

三軸角速度傳感器工作原理
三軸角速度傳感器(Tri-axial Gyroscope)是一種能夠同時測量物體繞X、Y、Z三個正交軸旋轉角速度的慣性傳感器,廣泛應用于導航、機器人、消費電子、汽車穩定控制等領域。其核心原理基于科里奧利力(Coriolis Force)或振動陀螺效應,以下從原理、結構、信號處理及典型應用四方面深入解析。一、核心工作原理:振動陀螺效應科里奧......
2025-05

6n137光耦怎么測好壞
6N137光耦的檢測方法與性能評估摘要:6N137光耦作為一種高速、高隔離度的光電耦合器,廣泛應用于工業控制、通信設備及電源管理等領域。其性能的穩定性直接關系到系統的可靠性和安全性。本文將系統介紹6N137光耦的檢測方法,包括外觀檢查、靜態參數測試、動態性能測試、傳輸特性分析以及綜合性能評估,旨在為工程師和技術人員提供全面的檢測指南。一、......
2025-05
橫擺角速度傳感器對駕駛有沒有影響?
橫擺角速度傳感器(Yaw Rate Sensor)是車輛動態穩定控制系統(如ESP/ESC)的核心部件,其性能直接關系到車輛的操控安全性與駕駛體驗。以下從安全性、操控性、舒適性及特殊場景四個維度,詳細解析其對駕駛的影響。一、安全性影響:主動預防失控關鍵作用過度轉向(后輪側滑):ESP通過制動外側前輪,抑制車輛甩尾。不足轉向(前輪側滑):E......
資訊推薦

云母電容公司_云母電容生產廠商

開關三極管13007的規格參數、引腳圖、開關電源電路圖?三極管13007可以用什么型號替代?

74ls74中文資料匯總(74ls74引腳圖及功能_內部結構及應用電路)

芯片lm2596s開關電壓調節器的中文資料_引腳圖及功能_內部結構及原理圖_電路圖及封裝

芯片UA741運算放大器的資料及參數_引腳圖及功能_電路原理圖?ua741運算放大器的替代型號有哪些?

28nm光刻機卡住“02專項”——對于督工部分觀點的批判(睡前消息353期)
推薦產品




推薦賣盤









 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)


